
APPLICATION
Humanoid Robots
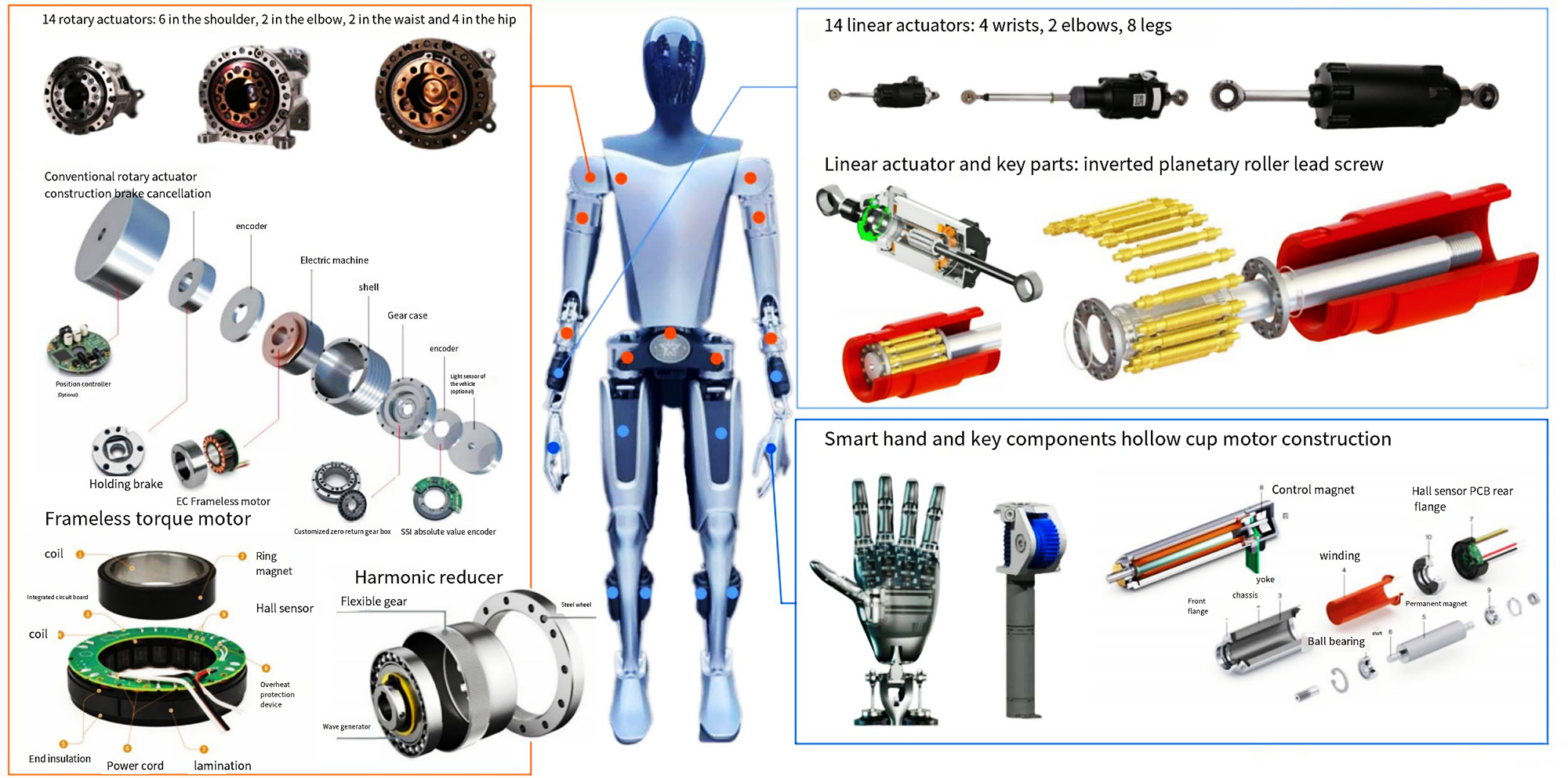
In humanoid robots, the application of coreless motors, frameless torque motors and planetary gear reducers is crucial, and they play unique roles in different systems and functional modules. Below is their detailed application description:
Coreless motors are widely used in humanoid robots because of their high efficiency and fast response, especially where high precision and high-speed control are required.
Frameless torque motors have been widely used in parts of robots that require strong torque and stability due to their advantages of high torque and low speed and large torque output.
Planetary gear reducers improve the output performance of motors by increasing torque and reducing rotational speed, and are used in multiple motion systems of robots.
Applications
Robot arm:
The wrist joint uses a coreless motor to achieve fast and flexible movements, a frameless torque motor is used for shoulder drive to provide powerful torque, and a planetary gear reducer increases the total torque output at each joint.
Bionic legs:
The hip and knee joints use frameless torque motors to achieve high load capacity, and planetary gear reducers provide precise deceleration and torque increase functions.
These driving technologies work in coordination to enable humanoid robots to achieve complex actions, smooth movements, and high-efficiency operations, promoting the wide application of humanoid robots in various fields, including industrial automation, service robots, and medical assistance.

Get in Touch
*We respect your confidentiality and all information are protected.